The ADACORSA project has started on the 01 st of May 2020. The start will be celebratet with a two day kick-off meeting taking place on June 3 rd - 4 th, 2020.

Provide European technology to render drones as a safe and efficient component of the mobility mix, with differentiated, safe and reliable capabilities in extended beyond visual line of sight (BVLOS) operations.

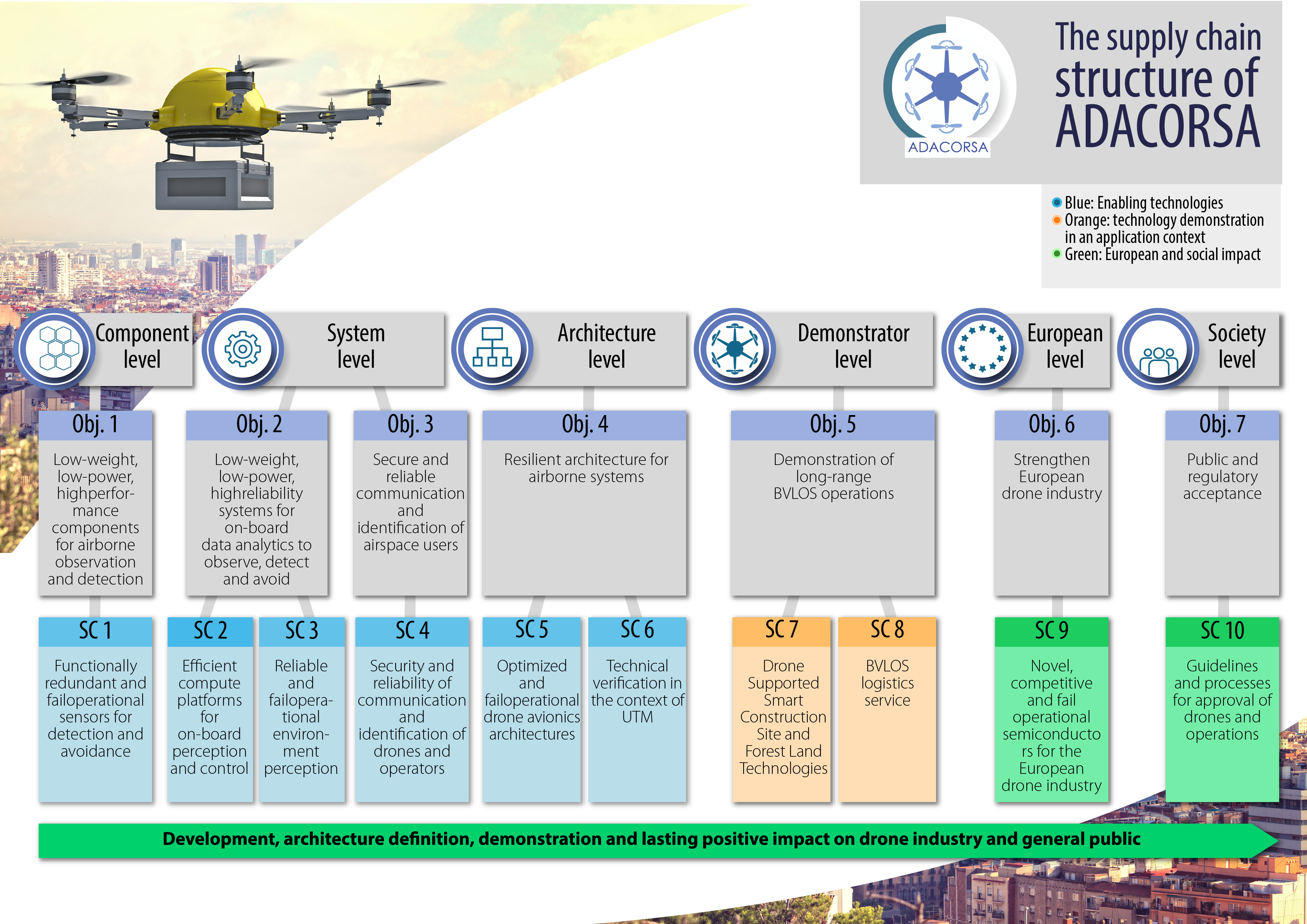
Our mission is to unlock the potential of BVLOS drone operations, contribute to the increased and regulatory acceptance of drone use. We aim to strengthen the integration of the automotive and drone industries and reduce deployment costs with sensing technology from the automotive industry and COTS communication technologies and services. Another goal is to embrace automotive-style efficient production of components and subsystems and integrate AI and data analytics into future air mobility.
The ADACORSA project has started on the 01 st of May 2020. The start will be celebratet with a two day kick-off meeting taking place on June 3 rd - 4 th, 2020.

© 2024 ADACORSA
| Imprint | Privacy Policy | Contact Us |