




Partners: IFAG, IFAT
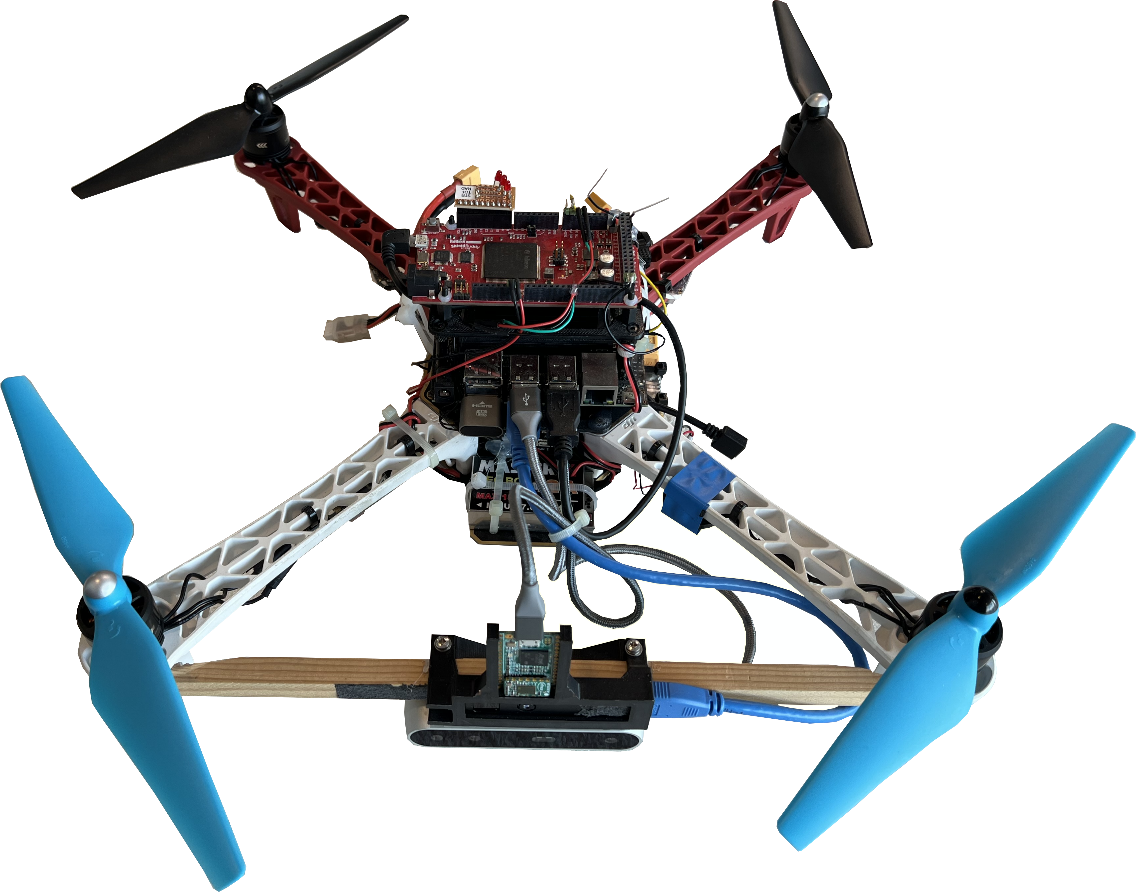
The Demo 5.1.2 consists of two drone systems: One for indoor and one for outdoor environments. The indoor demonstrator includes an environmental sensing module containing a time-of-flight camera, stereo camera and 60-GHz-radar sensor. Data from all three sensors is processed on a NVIDIA Jetson Nano computing board running ROS. The flight-critical algorithm for filtering and ensuring redundancy runs on an Aurix TC375 under a dedicated real-time operating system (PXROS). The data from all three sensors is fused to detect and classify objects in the drone’s path. Current activities include a series of experiments necessary for the validation and verification of the demonstrator setup and flight tests with obstacles to be avoided. The outdoor demonstrator extends the environmental sensor setup of the indoor demonstration (Stereo Camera, ToF camera, RADAR) with additional sensors enabling outdoor navigation (LiDAR, IMU, RTK GPS). Furthermore, it includes a COTS flight controller (Pixhawk4) and three embedded computing platforms (NVIDIA Jetson Nano, FPGA and Aurix TC375). The functionality of the architecture is showcased in multiple use case scenarios including data gathering, object detection and avoidance and Simultaneous Localization and Mapping (SLAM). The results will be showcased as a lab demonstration through HITL/SITL simulations with the help of a customized AirSim-based flight simulator that includes a model of the 60Ghz RADAR. Current activities include the validation of a HITL detect-and-avoid demonstration involving the NVIDIA Jetson Nano, the Aurix microcontroller and the flight controller.
